The new robotic gripper Andromina V.2.0 is the most advanced gripper that currently exists and has many applications. In this second version, the clamp has been greatly improved, the opening and closing of the clamp can be controlled by an encoder and a limit switch. The main advantage of this clamp is that it is controlled by means of standard radio control servo motors. These can be controlled directly from any Arduino board or any other board, such as Raspberry Pi, Beagleboard, Picaxe etc .... In this post we show the new mechanical design of the 5 grippers Andromina V.2.0. There are 5 different designs of clamp where we have varied the number of fingers that each clamp has and we can choose between 2, 3, 4, 5 or 6 fingers. We can also choose if we want a clamp with one, two or three degrees of freedom.
 |
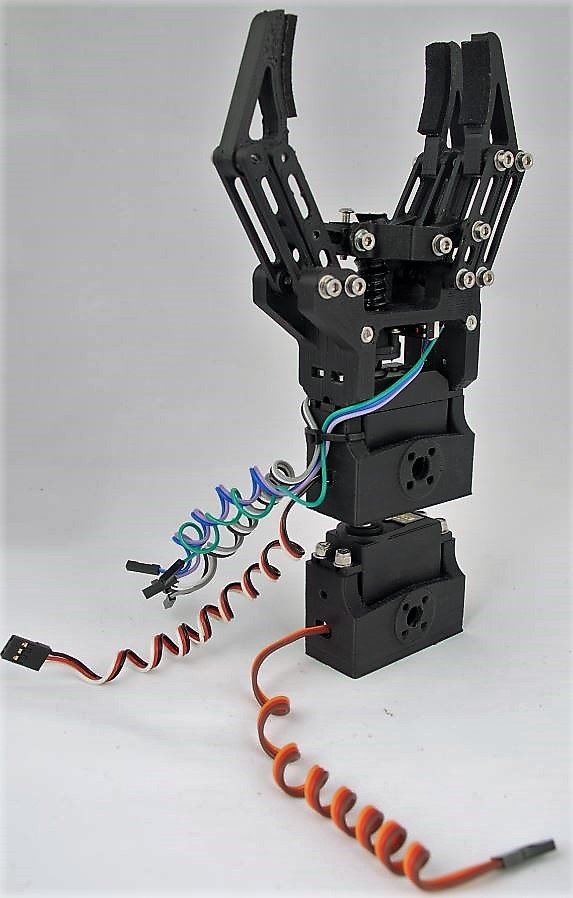
| Photo of the robotic gripper Andromina V.2.0 with six fingers. |
In the following picture you can compare the 5 different models of grippers, Andromina V.2.0. In this picture you can see grippers with a single degree of freedom, with a single servo motor RC.
 |
| View of the 5 models of robotic grippers Andromina V.2.0. |
1-Design of different robotic clamps: There are 5 different designs of the Andomina V.2.0 robotic grippers. In these five models we have varied the number of fingers that each clamp has and we can choose between 2, 3, 4, 5 or 6 fingers. All the fingers of the clamp open and close at the same time.
The following photograph shows the 6 fingers gripper. These clamps, being built in ABS plastic, have a reduced weight compared to their size. This model has 3 fingers facing the other 3 fingers and the 6 fingers are aligned. The photo clamp has two servomotors and weighs 293 grams and the caliper with a single servo motor weighs 216 grams.
 |
| Robotic gripper with six fingers. |
The following photograph shows the 5 fingers gripper. This model has 3 fingers facing the other 2 fingers, but the fingers are not aligned, they are out of phase with each other. The photo clamp with two servomotors weighs 266 grams and the clamp with a single servo motor weighs 189 grams.
 |
| Robotic clamp with five fingers. |
The following photograph shows the 4 finger gripper. This model has 2 fingers facing the other 2 fingers and the 4 fingers are aligned. The photo clamp with two servo motors weighs 238 grams and the clamp with a single servo motor weighs 160 grams.
 |
| Robotic caliper with four fingers. |
The following photograph shows the 3-finger gripper. This model has 2 fingers facing the other finger, but the fingers are not aligned, they are out of phase with each other. The photo clamp with two servomotors weighs 230 grams and the clamp with a single servo motor weighs 154 grams.
 |
| Robotic gripper with three fingers. |
The following photograph shows the 2 finger gripper. This model has 1 finger facing the other finger, 2 fingers are aligned. The clamp of the photo with two servomotors weighs 203 grams and the clamp with a single servo motor weighs 126 grams.
 |
| Robotic two-finger gripper |
2-Technical specifications of the grippers:
- The opening and closing of the gripper is performed by a RC servo motor that rotates 360º.
- The clamp can be controlled directly from any board. No need for any other components.
- The opening and closing speed of the clamp can be very easily controlled.
- Control of the clamp limit switch by means of a mechanical switch.
- Control of the opening and closing stroke of the clamp by means of a mechanical encoder.
- Reduced weight.
- Maximum opening 81mm.
- We can choose the number of fingers that the robotic hand has.
- We can choose the number of degrees of freedom of the clamp, between 1, 2 or 3 degrees of freedom. This depends on the number of servo motors carried by the clamp.
The picture below shows a fully open Andromina robotic clamp, which will hold a tennis ball.
 |
| The clamp fully open, can catch a tennis ball. |
To be continued.........
Nice Blog!! Thanks for kind information. For more information click here:-
ReplyDeleteRobotics Program
rscit certificate
personality development
ethical hackers academy
interior architecture courses
ms office computer course
national institute of open schooling result
distance education
its good for me i can sell it
DeleteNice
ReplyDelete